之前我们介绍了基本的Metropolis算法,没有实际演示它从所求的概率分布中采样的过程。在给出一个证明之前,我们首先讨论一个推广,被称为Metropolis-Hastings算法(Hastings,1970),这种情形下,提议分布不再是参数的一个对称函数。特别地,在算法的步骤中,当前状态为,我们从概率分布中抽取一个样本,然后以概率接受它, 其中
这里,标记出可能的转移集合中的成员。与之前一样,接受准则的计算不需要知道概率分布中的标准化常数。对于一个对称的提议分布,Metropolis-Hastings准则(11.44)会简化为标准的Metropolis准则(11.33)。
我们现在可以证明对于由Metropolis-Hastings算法定义的马尔科夫链是一个不变的概率分布,方法是证明公式(11.40)定义的细节平衡是成立的。使用公式(11.44),得到
证明完毕。
提议分布的具体的选择会对算法的表现产生重要的影响。对于连续状态空间来说,一个常见的选择是一个以当前状态为中心的高斯分布,这会在确定分布的方差参数时需要进行一个重要的折中。如果方差过小,那么接受的转移的比例会很高,但是遍历状态空间的形式是一个缓慢的随机游走过程,导致较长的时间开销。然而,如果方差过大,那么拒绝率会很高,因为在我们考虑的这种复杂问题中,许多的步骤会到达很低的状态。考虑一个多元概率分布,它在的元素之间具有很强的相关性,如图11.10所示。
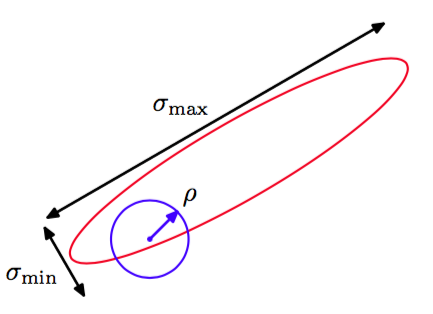
图 11.10 使用Metropolis-Hastings算法,用一个各项同性的高斯提议分布(蓝色圆圈)从一个具有相关性的多元高斯分布(红色椭圆)中采样,这个多元高斯分布在不同的方向上的标准差的数值相当不同。为 了让拒绝率较低,提议分布的标度应该与最小的标准差处于同一个量级,这会产生随机游走的行为,达到独立的状态所需的步骤数的量级为,其中是最大的标准差。
提议分布的标度应该尽可能大,同时要避免达到较高的拒绝率。这表明应该与最小的长度标度是同一个量级的。然后,系统通过随机游走的方式探索伸长的方向,因此到达一个与原始状态或多或少独立的状态所需的步骤数量是量级的。事实上,在二维的情形下,随着的增加,拒绝率的增加会被接收的转移步骤数的增加所抵消。更一般地,对于多元高斯分布,得到独立样本所需的步骤的数量的增长量级是的,其中是第二小的标准差(Neal, 1993)。抛开这些细节不谈,如果概率分布在不同的方向上的差异非常大,那么Metropolis-Hastings算法的收敛速度会非常慢。