现在,开始讨论有向图的条件独立性质。考虑三个简单的例子,每个例子涉及到只有三个结点的图。这些例子会说明d-划分中的关键概念。三个例子中的第一个如图8.15所示。
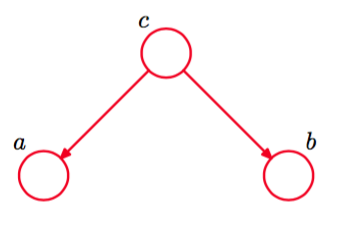
图 8.15 三个变量上的图模型的三个例子中的第一个,这些例子用来讨论有向图模型的条件独立性质。
使用公式(8.5)给出的一般结果,这个图的联合概率分布很容易写出来,即
如果没有变量是观测变量,那么我们可以通过对式(8.23)两边进行积分或求和的方式,考察是否是相互独立的,即
一般地,这不能分解为乘积,因此
其中表示空集,符号表示条件独立性质不总是成立。当然,通过给各个概率分布关联具体的数值,可能存在一个特定的分布使得条件独立的性质成立,但是一般情形下,不能构建图结构。
现在假设我们以变量为条件,如图8.16所示。根据式(8.23),我们可以很容易地写出给定的条件下,的条件概率分布,形式为
因此我们可以得到条件独立性质
通过考虑从结点经过结点到结点,我们可以给这个结果一个简单的图表示。结点被称为关于这个路径“尾到尾”(tail-to-tail),因为结点与两个箭头的尾部相连。这样的一个连接结点和结点的路径的存在使得结点相互依赖。然而,当我们以结点为条件时(如图8.16所示),被用作条件的结点“阻隔”了从到的路径,使得变得(条件)独立了。
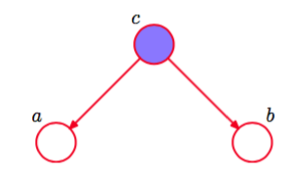
图 8.16 与图8.15相同,但是我们以变量为条件。
我们可以类似地考虑图8.17给出的图。
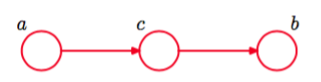
图 8.17 3结点图的三个例子中的第二个,这些例子用来说明有向图模型的条件独立框架。
这幅图对应的联合概率分布可以通过一般形式的式(8.5)得到,形式为
首先,假设所有的变量都不是观测变量。与之前一样,我们可以考察是否是相互独立的,方法是对积分或求和,得到
这通常不能够分解为,因此
这个结果与之前的相同。
现在假设我们以结点为条件,如图8.18所示。
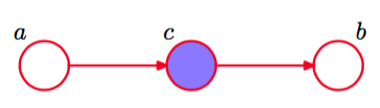
图 8.18 与图8.17相同,但是现在以为条件
使用贝叶斯定理,以及式(8.26),得到
从而我们又一次得到了条件独立性质
同样的,我们可以用图表示这个结果。结点被称为关于从结点到结点的路径“头到尾”(head-to-tail)。这样的一个路径连接了结点和结点,且使它们互相之间存在依赖关系。如果我们现在观测结点,如图8.18所示,那么这个观测“阻隔”了从到的路径,因此我们得到了条件独立性质。
最后,我们考虑第三个3结点图的例子,如图8.19所示。
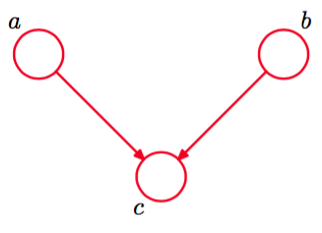
图 8.19 3结点图的三个例子中的最后一个例子,这些例子用来研究图模型中的条件独立性质。这张图与前两个例子的性质相当不同。
正如我们将看到的那样,这幅图的行为比之前两幅图更微妙。
与之前一样,联合概率分布可以使用我们的一般结果(8.5)得到。
首先考虑当没有变量是观测变量时的情形。对式(8.28)两侧关于积分或求和,得到
因此当没有变量被观测时,是独立的,这与前两个例子相反。我们可以把这个结果写成
现在假设我们以为条件,如图8.20所示。
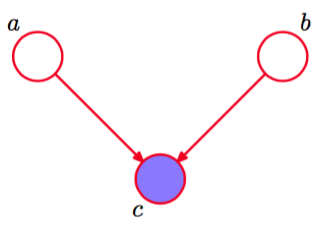
图 8.20 与图8.19相同,但是以结点的值为条件。这张图中,引入条件结点使得之间产生了依赖关系。
的条件概率分布为
这通常无法被分解为乘积,因此
因此,我们第三个例子与前两个例子的行为相反。图形上,因为连接了两个箭头的头,所以我们说结点关于从到的路径是“头到头”(head-to-head)。当结点没有被观测到的时候,它“阻隔”了路径,从而变量是独立的。然而,以为条件时,路径被“解除阻隔”,使得相互依赖了。
第三个例子还有一个更加微妙的地方需要考虑。首先,我们引入一些新的概念。如果存在从结点到结点的一条路径,其中路径的每一步都沿着箭头的方向,那么我们说结点是结点的后继(descendant)。这样,可以证明,在一个头到头的路径中,如果任意结点或者它的任意一个后继被观测到,那么路径会被“解除阻隔”。
总之,一个尾到尾结点或者头到尾结点使得一条路径没有阻隔,除非它被观测到,之后它就阻隔了路径。相反,一个头到头结点如果没有被观测到,那么它阻隔了路径,但是一旦这个结点或者至少一个后继被观测到,那么路径就被“解除阻隔”了。
花一些时间进一步理解图8.20给出的图的不寻常的行为是很有意义的。考虑一个特定的实例,即这个图对应于下面的问题:问题中有三个二值随机变量,这些变量与汽车的燃料系统相关,如图8.21所示。
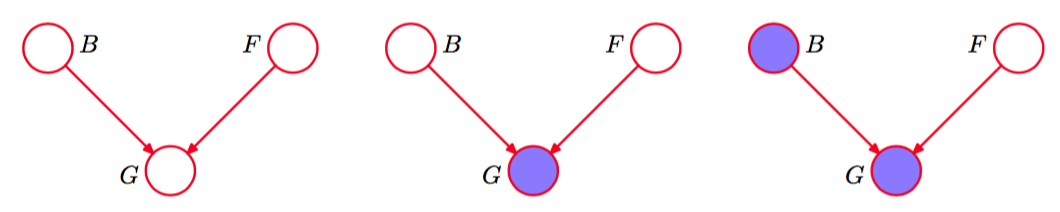
图 8.21 一个3结点图的例子,用来说明“辩解”的现象。三个结点表示电池的状态(B)、油箱的状态(F)以及油量计读数的状态(G)。
变量B表示电池的状态是充电过(B = 1)还是没充电(B = 0),变量F 表示油箱是满的(F = 1)还是空的(F = 0),变量G表示电子油量测量计给出的读数是满的(G = 1)还是空的(G = 0)。电池要么充电过,要么没充电。与此独立,油箱要么是满的,要么是空的。二者的先验概率为
给定油箱和电池的状态,油量计给出“满的”读数的概率为
所以这是一个相当不可靠的油量计。所有剩下的概率根据总和等于的要求来确定,因此我们得到了一个完整的概率模型。
在我们观测到任何数据之前,油箱为空的先验概率为。现在假设我们观察油量计,发现读数为“空的”,即G = 0,对应于图8.21的中间的图。我们可以使用贝叶斯定理计算油箱为空的后验概率。首先,我们计算贝叶斯定理的分母,结果为
类似地,我们得到
使用这些结果,得到
从而。因此观测到油量计的读数为空使得油箱确实为空的概率增加,这与我们的直觉相符。接下来假设我们也检查了电池的状态,发现它没充电,即B = 0。 我们现在观测到了油量计的状态和电池的状态,如图8.21的右侧图所示。给定油量计的观测以及电池状态的观测,油箱为空的后验概率为
其中先验概率在分子和分母之间消去了。因此,由于电池状态的观测结果,油箱为空的概率减小了(从0.257到0.111)。这与我们的直觉相符,即发现电池没充电“辩解”(explain away)了油量计的读数为“空的”。我们看到,由于观测到了油量计的读数,油箱的状态和电池的状态确实变得不独立了。事实上,如果我们没有直接观测到油量计的读数,而是观测到了G的后继,那么情况仍然相同。注意,概率大于先验概率,因为观测到油量计读数为零仍然给油箱为空提供了一定的证据。